Puisqu'il s'agit d'une question récurrente, je préfère ajouter ma réponse ici qu'aux plus récentes.
J'espère pouvoir clarifier certains points qui n'étaient pas complètement bien ciblés dans certaines réponses précédentes.
KDescription cinématique
Une fois que nous avons choisi le cadre de référence que nous aimons (ici peu importe s'il est inertiel ou non) et que nous avons une description des trajectoires de N corps, disons N vecteurs $ {\ bf r} _i (t) $ , on peut toujours utiliser un référentiel centré sur l'un des corps, disons le a -th, en soustrayant simplement le vecteur de position du corps choisi à tout autre vecteur de position. Par conséquent, dans ce nouveau référentiel, les trajectoires du système original de N corps seront:
$$
{\ bf r} ^ {\ prime} _i (t) = {\ bf r} _i (t) - {\ bf r} _a (t). ~~~~~~~~~~~~~~~ [1]
$$
Il est clair que dans ce nouveau cadre $ {\ bf r} ^ {\ prime} _a (t) = 0 $ par construction, soit le a -th corps est au repos pour toujours.
Un exemple d'une telle transformation de coordonnées est le changement de référentiel nécessaire si l'on veut trouver la description correcte du système solaire tel que vu par un observateur sur la Terre, à partir des trajectoires dans le référentiel (inertiel) où le le centre de masse du système solaire est au repos. Notice qu'un observateur au repos à la surface de la Terre ne traduit pas seulement avec la planète, par rapport au centre de masse, mais qu'il / elle tourne également, de sorte que la transformation réelle serait plus compliquée que eqn. [ $ 1 $ ]. Cependant, nous pouvons ignorer la nécessité d'une rotation supplémentaire de nos vecteurs si nous limitons nos considérations aux cadres de référence qui ne tournent pas par rapport au cadre d'origine.
À ce stade, il devrait être clair qu'il n'y a rien de mal à décrire le mouvement des corps du système solaire depuis la Terre. C'est juste l'un des choix infinis possibles de l'origine du cadre de référence, probablement le plus utile pour les observateurs basés sur la Terre. Il a le même droit d'être utilisé comme cadre de référence fixé sur une voiture en mouvement pour décrire ce que voient les passagers.
Cependant, la possibilité de changer de point de vue n'implique pas que des choix différents fourniraient la même description des trajectoires dans un système à N corps.
Assez intéressant, si nous partons d'un cadre de référence où le corps $ a $ est au repos, c'est-à-dire $ {\ bf r} _a (t) = 0 $ , où un deuxième corps b se déplace selon $ {\ bf r} _b (t) $ span>, et nous passons à un nouveau cadre de référence basé sur le corps $ b $ , dans le nouveau corps du système $ a $ sera décrit par le vecteur $ {\ bf r} ^ {\ prime} _a (t) = - {\ bf r} _b (t) $ . Cela implique que le mouvement de $ a $ vu par $ b $ ou le mouvement de $ b $ vu par $ a $ ne diffèrent que par une inversion et ont donc la même description synthétique.
Pourquoi ne pas appliquer les considérations ci-dessus au système Terre-Soleil?
Dans le cas du système à deux corps, les choses sont assez simples. La forme de la trajectoire de la Terre vue du Soleil ou celle du Soleil vue de la Terre sont les mêmes. De plus, comme le centre de masse du système Soleil-Terre se trouve dans le Soleil, la trajectoire de la Terre vue depuis le Soleil coïncide presque avec la même orbite que celle décrite depuis le centre de masse.
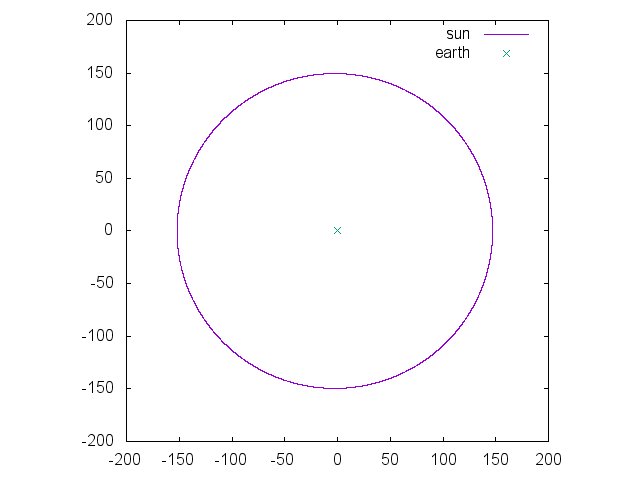
Dans les deux figures suivantes, j'ai tracé l'orbite des deux corps dans le cadre de référence du centre de gravité
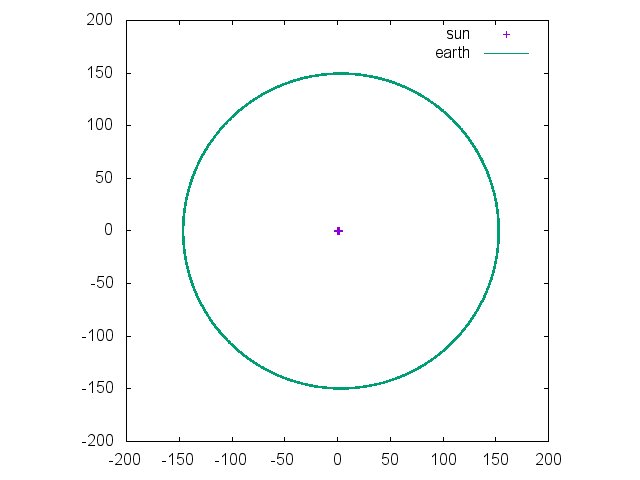
et dans le cadre de référence de la Terre (non rotative). Les unités de distance sont des millions de kilomètres.
Les choses changent beaucoup lorsque nous décrivons le mouvement d'autres corps du système solaire. Les deux graphiques suivants montrent le mouvement du Soleil, de Vénus, de la Terre, de Mars et de Jupiter, vu du centre de masse du système ou de la Terre (non rotative).
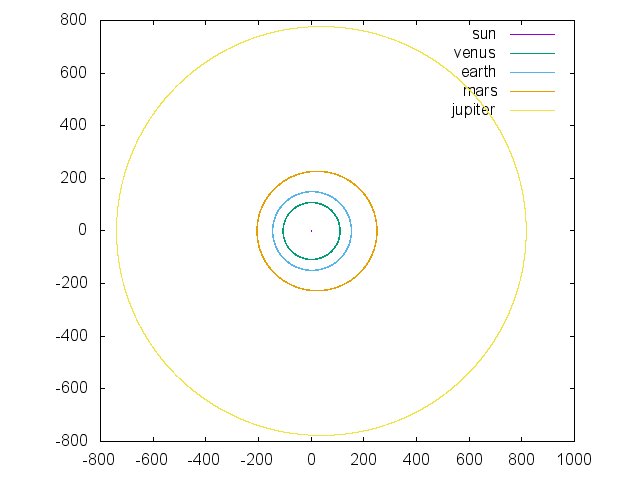
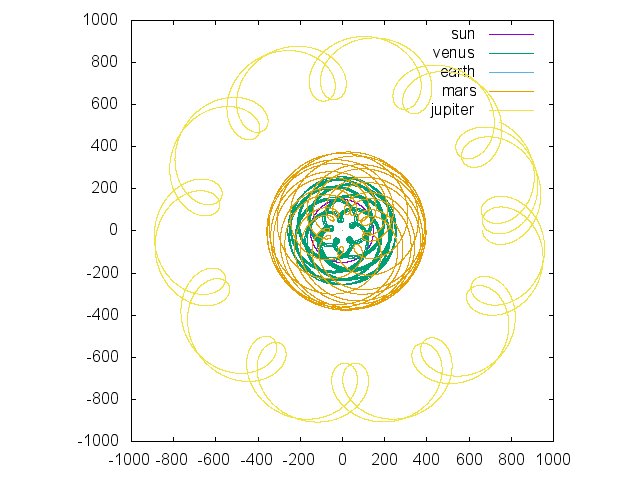
Même à ce niveau cinématique, la plus grande simplicité de la description au centre du cadre de masse est évidente. Néanmoins, je tiens à souligner une fois de plus que rien ne va pas avec cette description. C'est le plus proche de ce que nous obtenons des observations basées sur la Terre.
DDescription dynamique
Du point de vue de la résolution d'un problème de dynamique newtonienne, nous savons tous que le référentiel du centre de masse d'un système à N corps est pratique. Puisqu'il s'agit d'un référentiel inertiel, nous pouvons utiliser la loi de Newton $ {\ bf F} = m {\ bf a} $ en relation avec la loi de force gravitationnelle de Newton, sans besoin d'introduire des forces d'inertie supplémentaires.
Notez cependant qu'une fois que l'on a écrit l'ensemble des équations différentielles du mouvement pour le problème gravitationnel à N corps:
$$
{\ bf a} _i = G \ sum_ {j \ neq i} m_j \ frac {({\ bf r} _j - {\ bf r} _i)} {\ gauche | {\ bf r} _j - {\ bf r} _i \ right | ^ 3}
$$
il est trivial d'écrire les équations de mouvement référées au corps $ a $ :
$$
{\ bf a '} _ {i} = G \ sum_ {j \ neq i} m_j \ frac {({\ bf r'} _ j - {\ bf r '} _ i)} {\ gauche | {\ bf r '} _j - {\ bf r'} _ i \ right | ^ 3} - G \ sum_ {j \ neq a} m_j \ frac {({\ bf r '} _ j - {\ bf r'} _ a)} { \ gauche | {\ bf r '} _ j - {\ bf r'} _ a \ right | ^ 3} ~~~~~~~~~~~ [2]
$$
où
$$
{\ bf r '} _ i = {\ bf r} _i - {\ bf r} _a
$$
et
$$
{\ bf a '} _ i = {\ bf a} _i - {\ bf a} _a = \ frac {{\ mathrm d} ^ 2 ({\ bf r} _i - {\ bf r} _a)} {{ \ mathrm d} t ^ 2}.
$$
Il y a deux choses intéressantes à remarquer dans eqn. 2, la première pourrait aider à clarifier certaines affirmations présentes dans d’autres réponses:
- le deuxième terme à droite n'est rien d'autre que la contribution de la force d'inertie à l'accélération de la particule $ i $ -th. C'est un terme purement translationnel et no force centrifuge ou de Coriolis apparaît , puisque le référentiel non inertiel coïncidant avec le corps $ a $ n'est pas tournant. C'est une idée fausse assez répandue de penser que dans tous les référentiels géocentriques, il devrait y avoir une force centrifuge. En fait, un cadre de référence fixé sur Terre, mais ne tournant pas par rapport au centre du cadre de masse, n'introduit pas une telle force d'inertie, comme visible à partir de la formule [ $ 2 $ ] .
- dans le cas particulier du problème à deux corps, éqn. [ $ 2 $ ] pour le corps $ 1 $ span> devient:
$$
{\ bf a '} _ {1} = G m_2 \ frac {({\ bf r'} _ 2 - {\ bf r '} _ 1)} {\ gauche | {\ bf r'} _ 2 - {\ bf r '} _1 \ right | ^ 3} - G m_1 \ frac {({\ bf r'} _ 1 - {\ bf r '} _ 2)} {\ left | {\ bf r'} _ 1 - {\ bf r ' } _2 \ right | ^ 3} = G (m_1 + m_2) \ frac {({\ bf r '} _ 2 - {\ bf r'} _ 1)} {\ left | {\ bf r '} _ 2 - {\ bf r '} _ 1 \ right | ^ 3}.
$$
En multipliant les deux côtés par $ \ mu = m_1m_2 / (m_1 + m_2) $ , nous reconnaissons l'équation classique du mouvement relatif
$$
\ mu {\ bf a '} _ {1} = G m_1m_2 \ frac {({\ bf r'} _ 2 - {\ bf r '} _ 1)} {\ gauche | {\ bf r'} _ 2 - {\ bf r '} _ 1 \ droite | ^ 3}
$$
où la masse réduite $ \ mu $ apparaît ici comme effet de la force d'inertie.